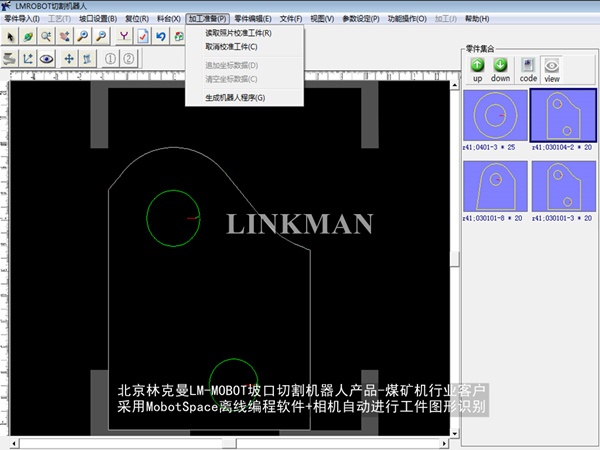
北京林克曼完全自主版权基于Windows平台的64位MobotSpace-P二次坡口切割机器人离线编程排料软件,实现了在办公室电脑屏幕上完成机器人坡口切割生产过程的模拟和校验,保证下载到机器人控制器后的准确和可靠。
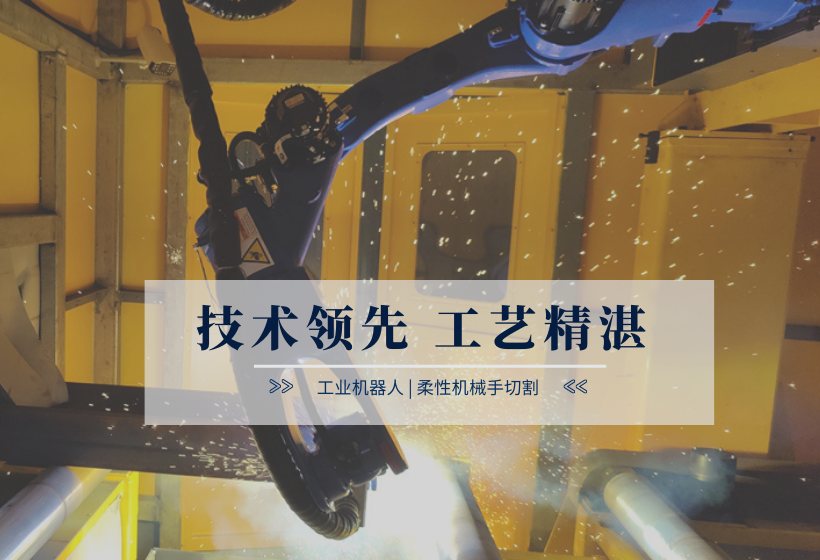
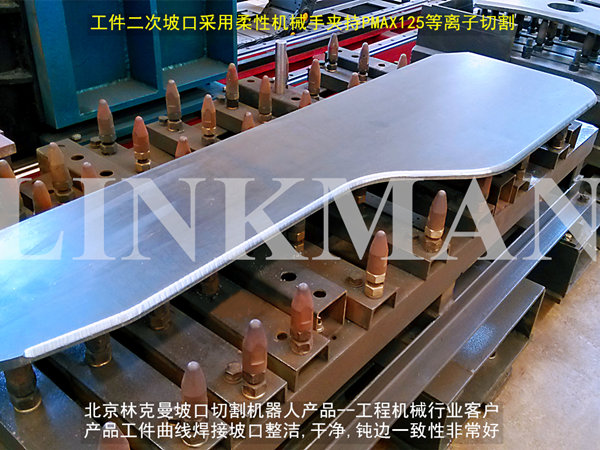
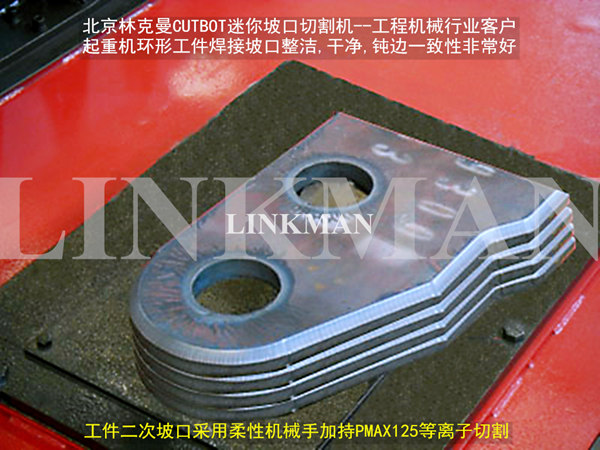
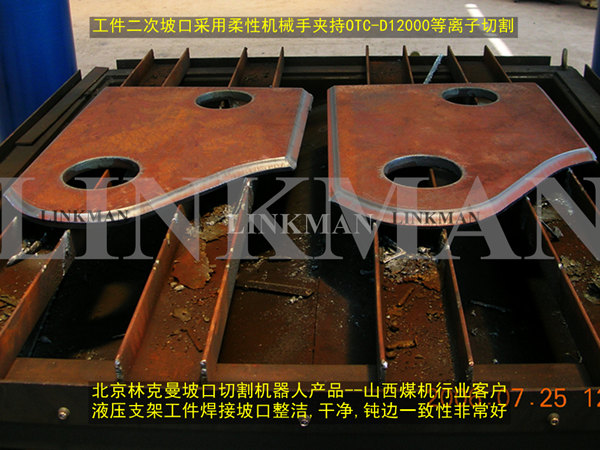
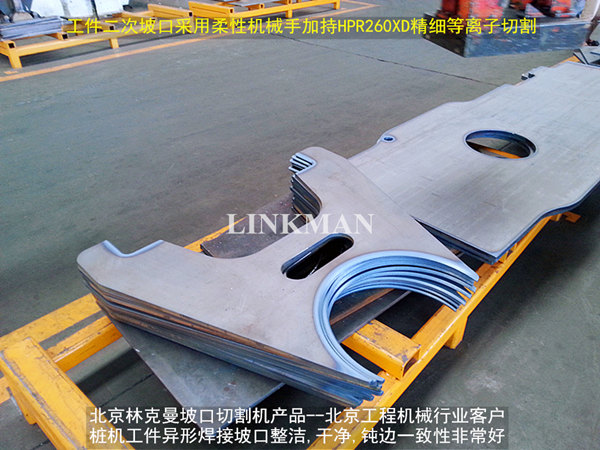
MobotSpace-P适用于平板工件的二次坡口的柔性机械手切割,特殊应用可根据客户需求开发定制。
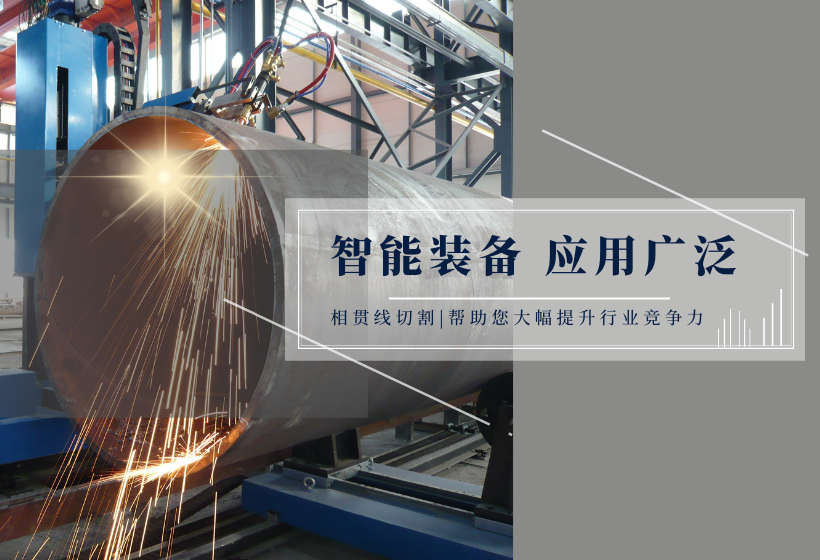
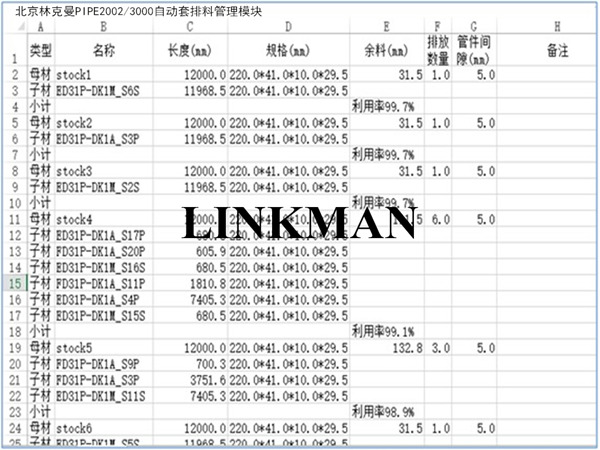
MobotSpace适用型材(GB/JIS/ASTM)等行业标准规范,焊接坡口提供:定角、定点、固定、AWS、API,特别适合建筑机械、工程机械、煤矿机械、海工造船、仓储物流、桥梁铁塔、起重车辆等行业钢结构焊接构件的下料和切割。完全可兼容IGES、DXF、SAT和 STL等软件数据格式,提供DSTV等同规范的切割机床代码。
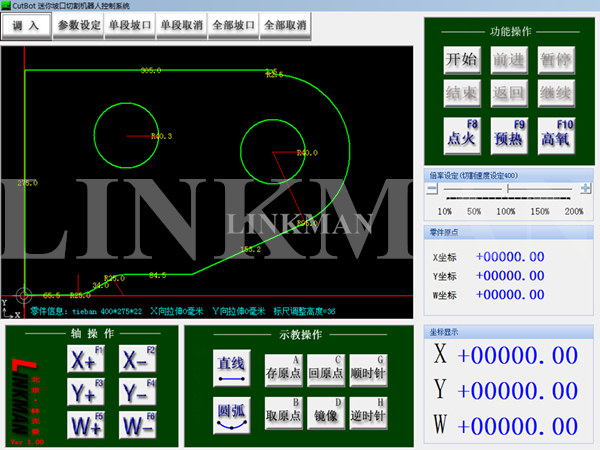
•北京林克曼自主版权的64位MobotSpace-P数控平板切割机零件二次坡口切割机器人离线编程软件基于Windows平台开发,实现了在办公室电脑上可完成平板零件二次焊接坡口的机器人切割作业过程的模拟和校验,保证下载到车间切割机器人控制器后的坡口切割过程的准确和可靠。

•MobotSpace-P软件可直接读取Tekla或AutoCAD等流行设计软件数据文件,无需二次编程,在办公室即可实现对坡口切割机器人加工路径进行快速检查和校验,自动生成的切割机器人指令代码和工艺文件,为焊接坡口的柔性机械手切割提供支撑,特殊应用可根据客户需求开发定制。

•MobotSpace-P软件提供简单实用的(激光光标和机械定位块)工件特征边定位法,可实现V、Y、X、K型焊接坡口(结合工件镜像实现负坡口)的切割编程。采用选择沿工件X或Y向拉伸,对数控平板切割机一次落料误差进行补偿和修正,同时提供DSTV等同规范切割机床代码。
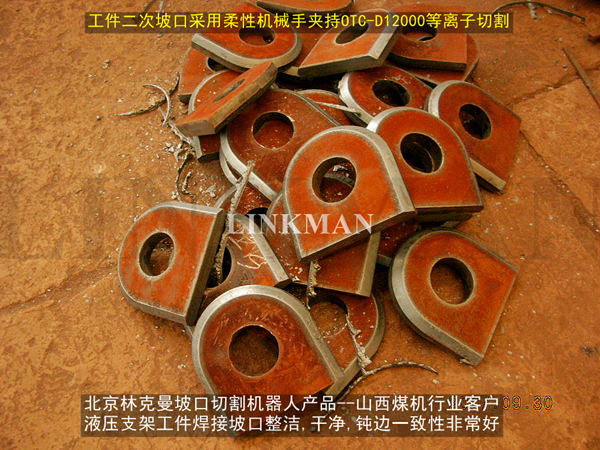
•MobotSpace-P软件特别适合建筑机械、工程机械、煤矿机械、海工造船、仓储物流、桥梁铁塔、起重车辆等行业数控平板切割机零件的二次焊接坡口的切割生产。


•可扩展搭建生产车间环境(模型空间);
•提供3D-OPENGL三维渲染图形可视化编程;
•Tekla,AutoCAD,3D3S,Tribon,UG,Solid,Edge软件接口。
•可提供客户软件数据IGES,DXF,SAT和STL格式导入;
•机器人路径与任务规划;
•机器人冲突检测;
•可扩展机器人模型(Yaskawa/ABB/OTC/KUKA…);
•可扩展机器人工具。


•参数化编程(根据客户需求扩充);
•工件3D-OPENGL三维渲染图形显示;
•工业机器人程序模拟;
•切割工件图形标注、打印;
•制作工艺、定额报表等。


| 购买人 | 会员级别 | 数量 | 属性 | 购买时间 |
|---|